研究成果・技術シーズ
掲載年度:令和3年度 / 最終更新日:
協働型双腕ロボットによる仕上げ加工の自動化
【ポイント】
協働型双腕ロボット(図1)を用いて、仕上げ加工システムを構築しました。

図1 協働型双腕ロボット
【内容】
① 仕上げ加工にかかる力の計測
協働型ロボットは人の近くに配置できる一方で、一般的な産業用ロボットに比べて可搬重量が小さくなります。そこで、仕上げ加工にかかる力とモーメントを計測し、協働型ロボットの適用可能性を評価しました。
② ロボットハンドの構築
ロボットが対象部品を安定的に掴むため、対象物の運動の拘束条件に基づいて、ロボットハンドを設計し、試作しました(図2)。
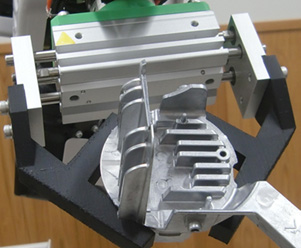
図2 ロボットハンド
③ バリ検出
接触式変位センサを用いた微細バリの検出方法を提案しました(図3)。
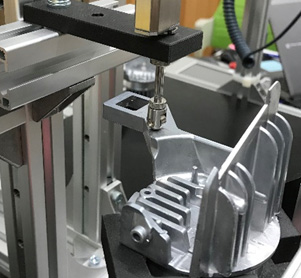
図3 センサによるバリ検出
上記①~③に加え、関連機器とロボットのプログラム開発を行い、仕上げ加工システムを構築しました(図4)。
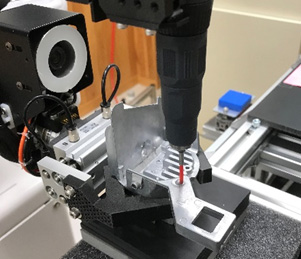
図4 ロボットによる仕上げ加工
【展開例】
- ロボットハンドの設計・試作
- ロボットによるバリ取り
- ロボットの動作検証
問合せ先
研究推進グループ
〒311-3195 茨城県東茨城郡茨城町長岡3781-1
TEL:029-293-7492 FAX:029-293-8029