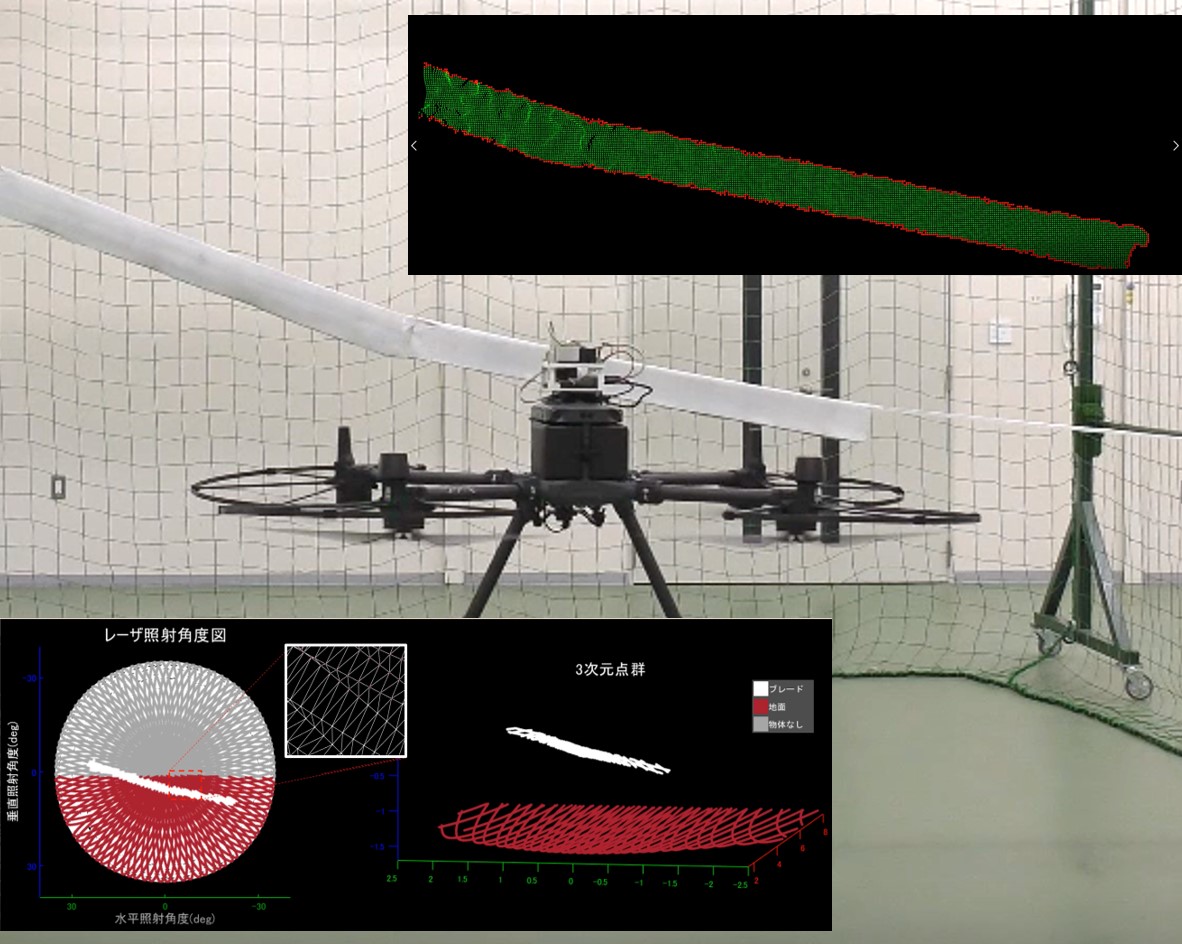
検索はこちらから 一覧 - 点群処理 令和6年度年度 ドローン自律運転に向けた撮影データ処理手法の開発 風車外観検査の全自動化を目的に、LiDARで撮影した点群のデータ処理による外部環境の認識を行い、自律飛行ドローン点検システムの開発を行いました。 キーワード 点群処理 ドローン 自律飛行 自動運転 お問い合わせ 研究推進G 令和3年度年度 画像認識技術のロボット応用 ロボットとカメラを連動させることでロボットに高度な「目」の機能を与える技術を開発。 キーワード 画像認識 点群処理 ロボット AI 省力化 お問い合わせ 研究推進G