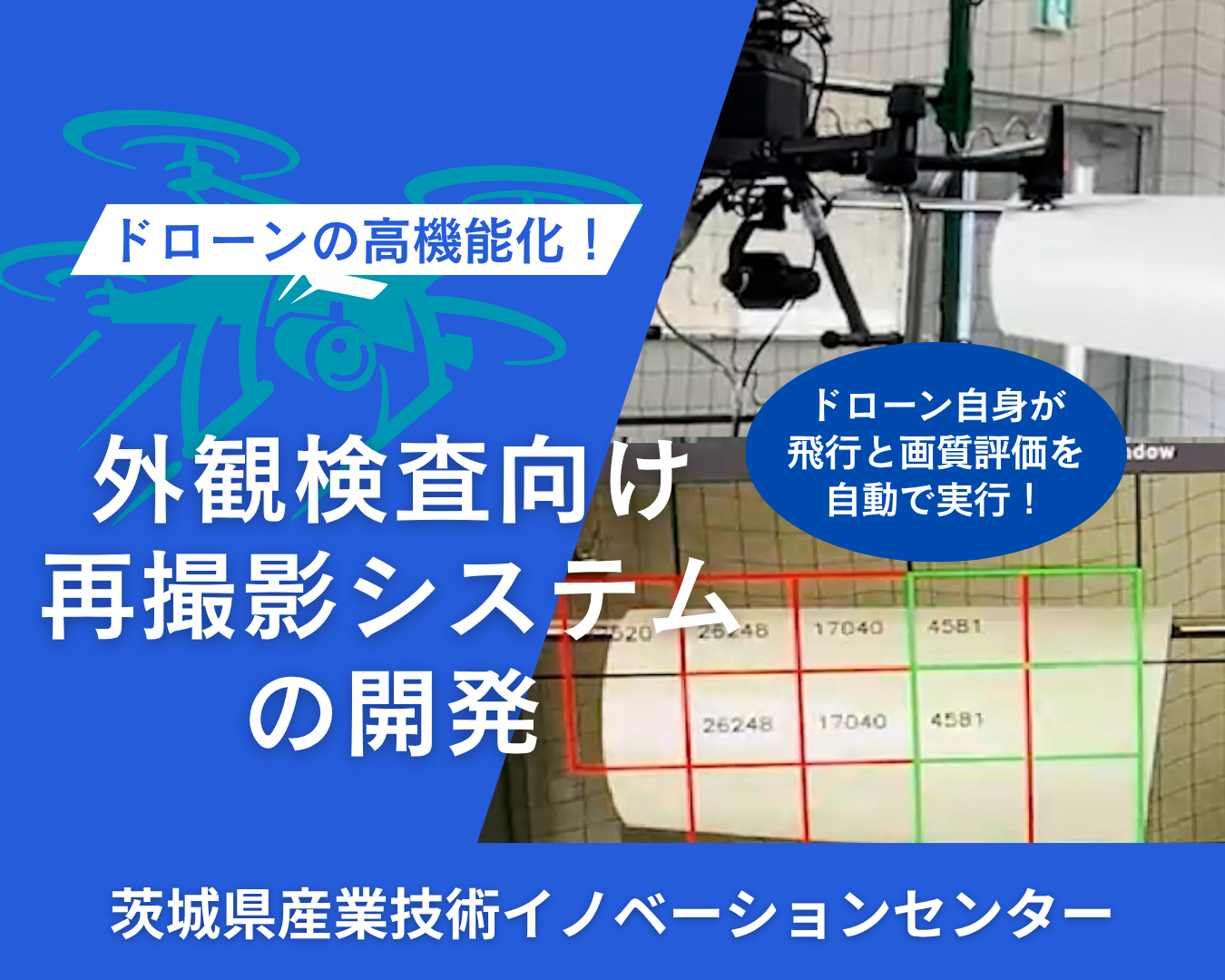
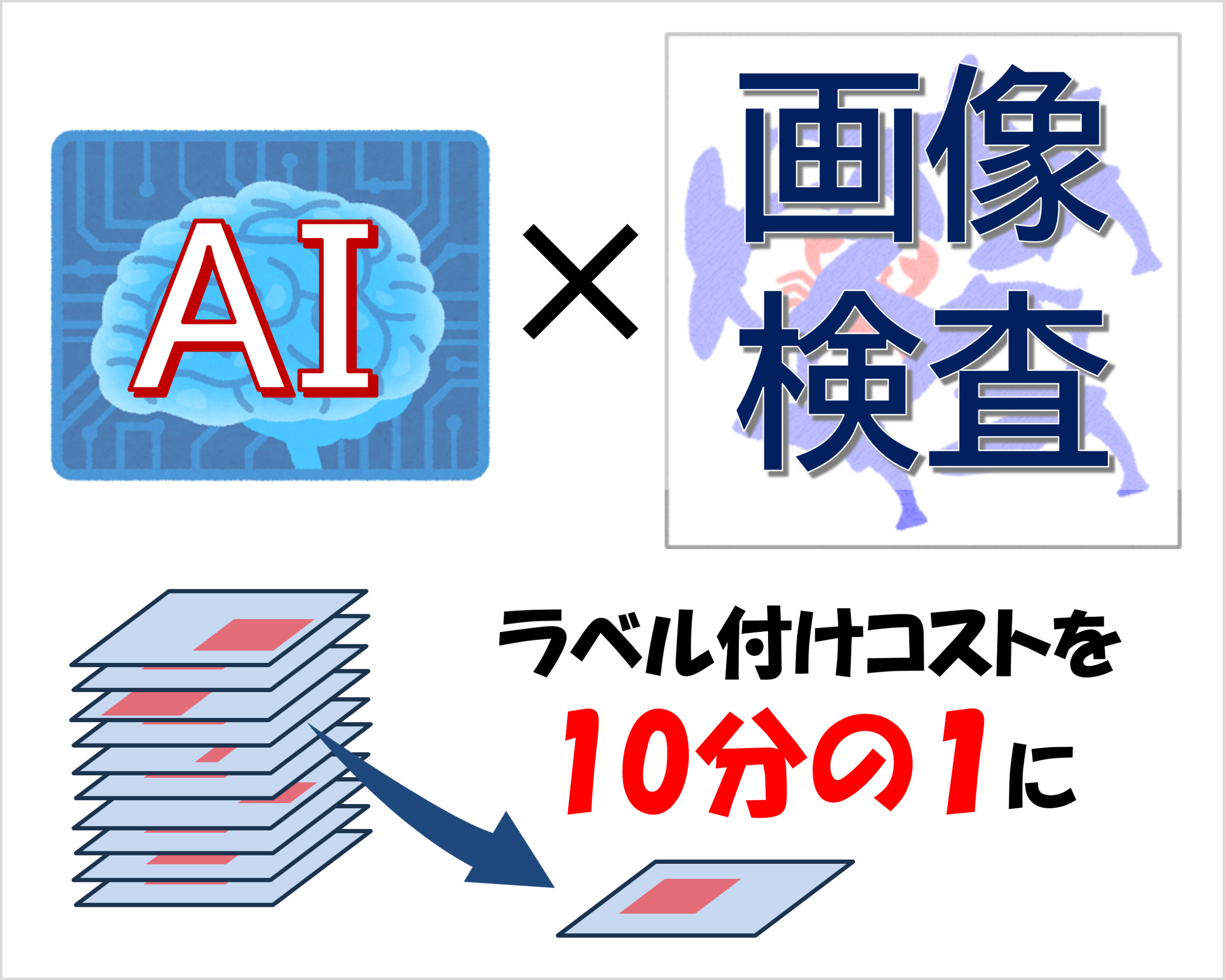
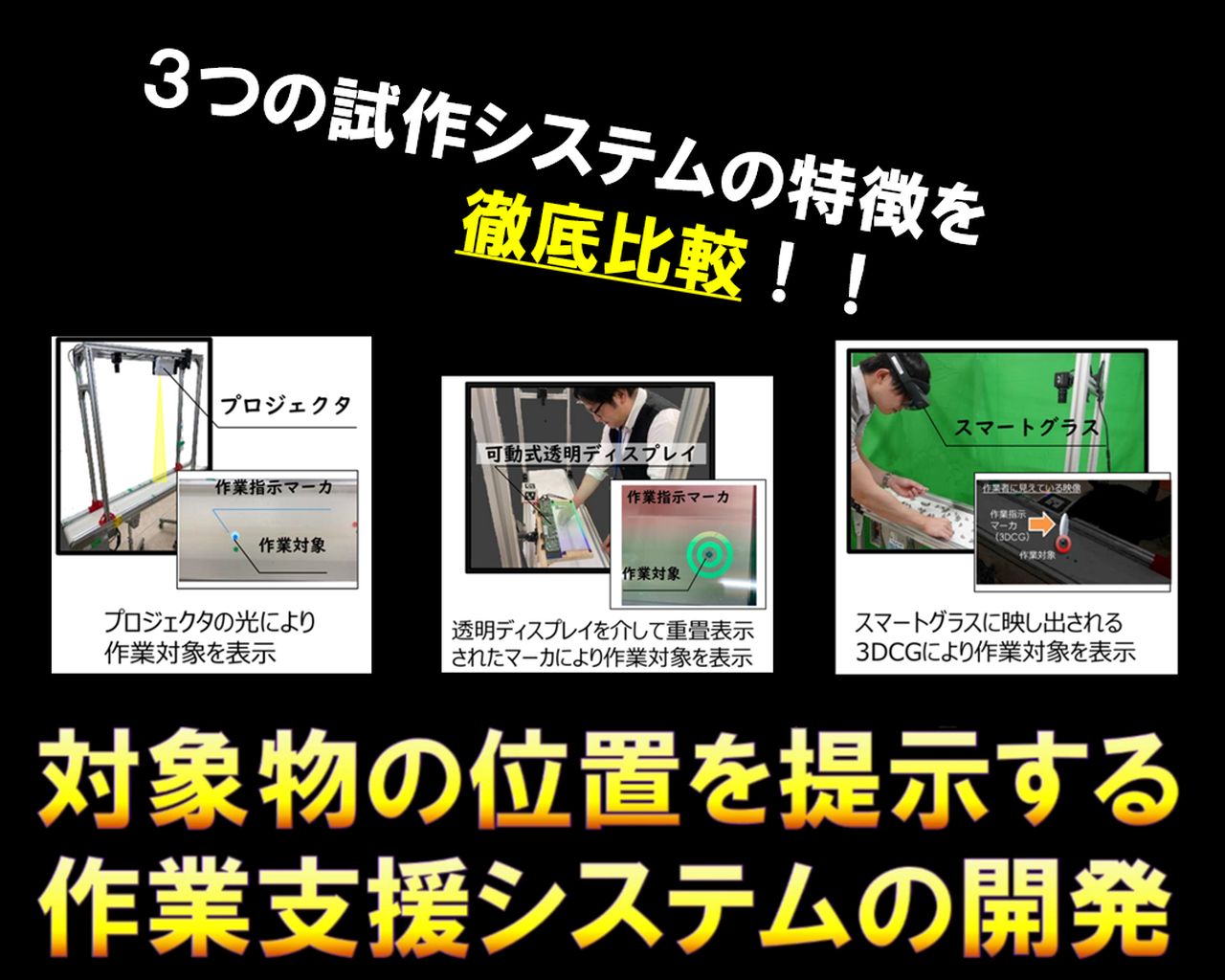
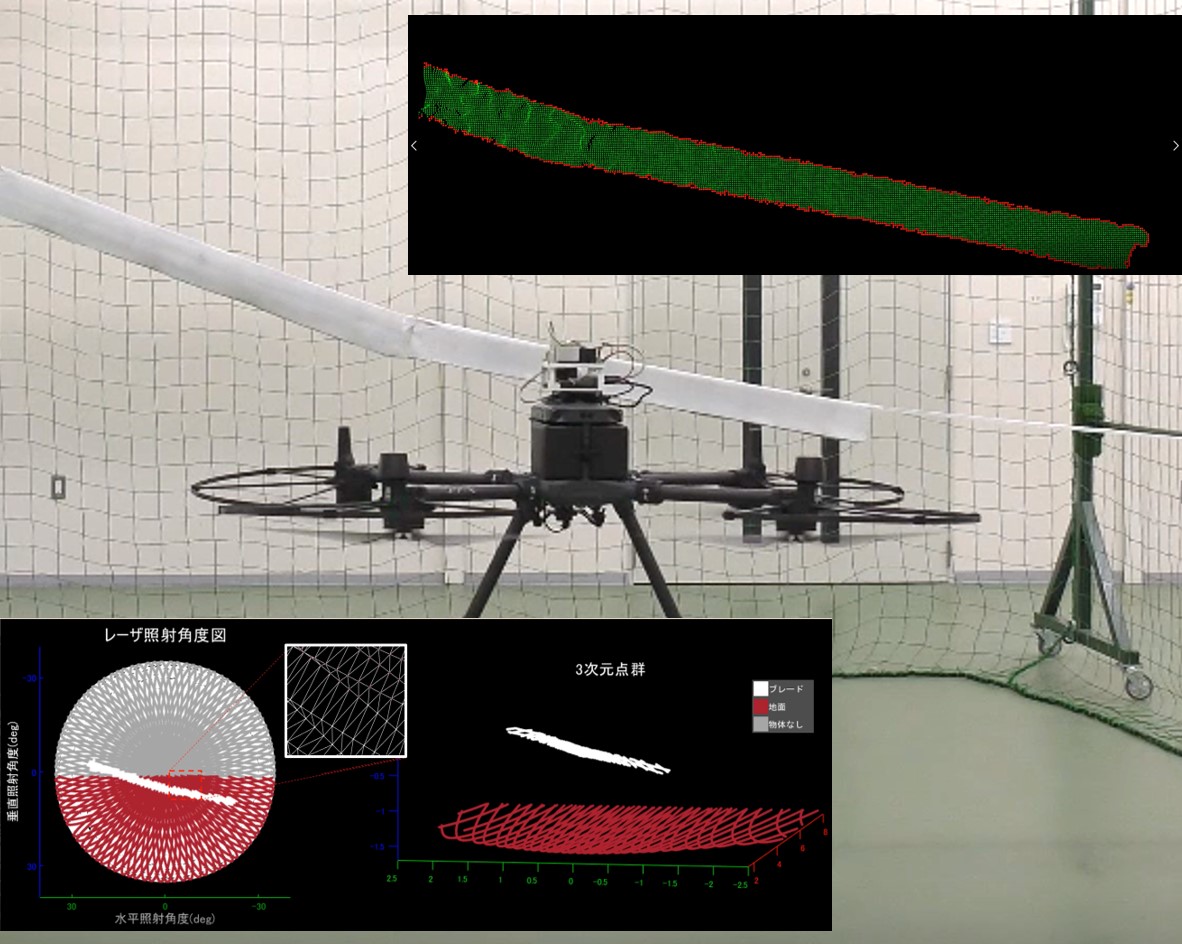
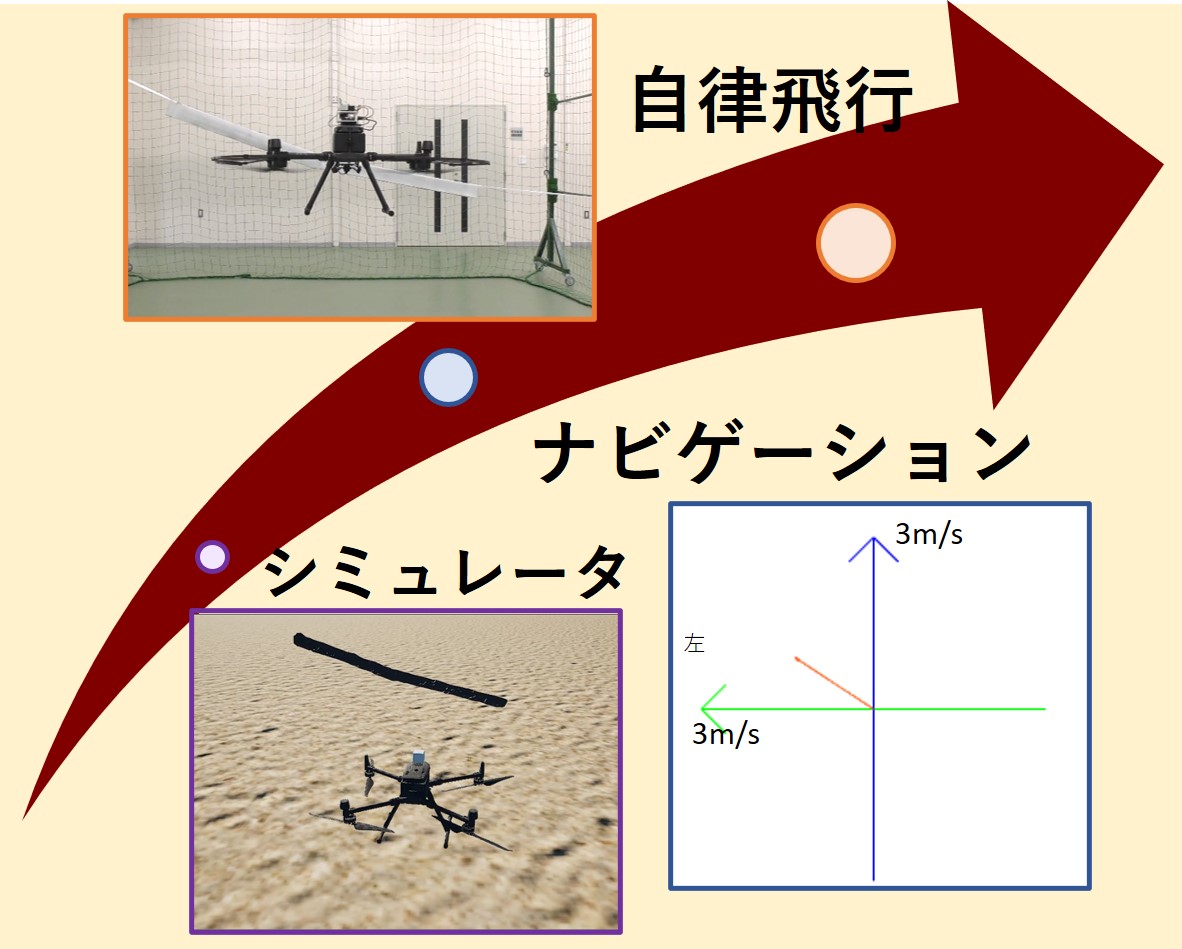
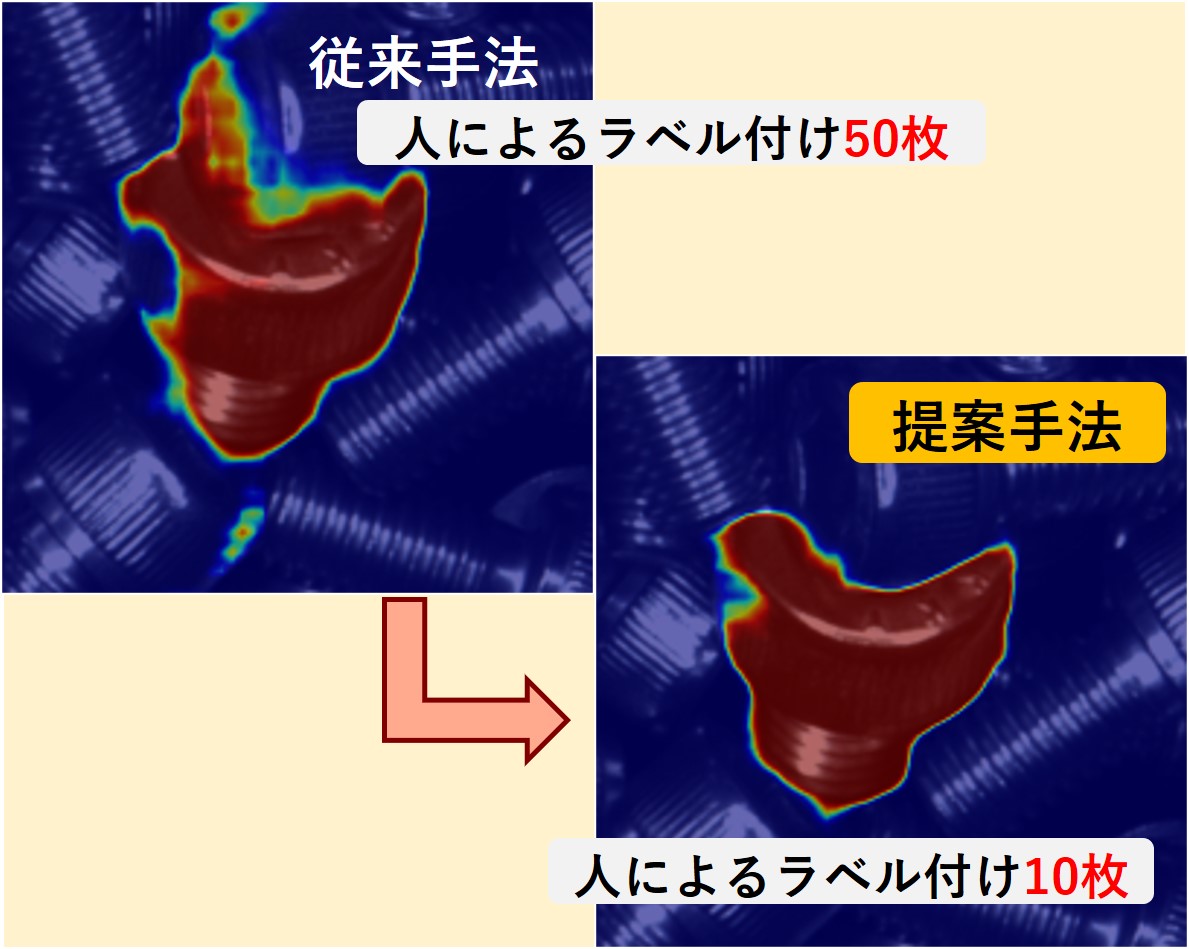
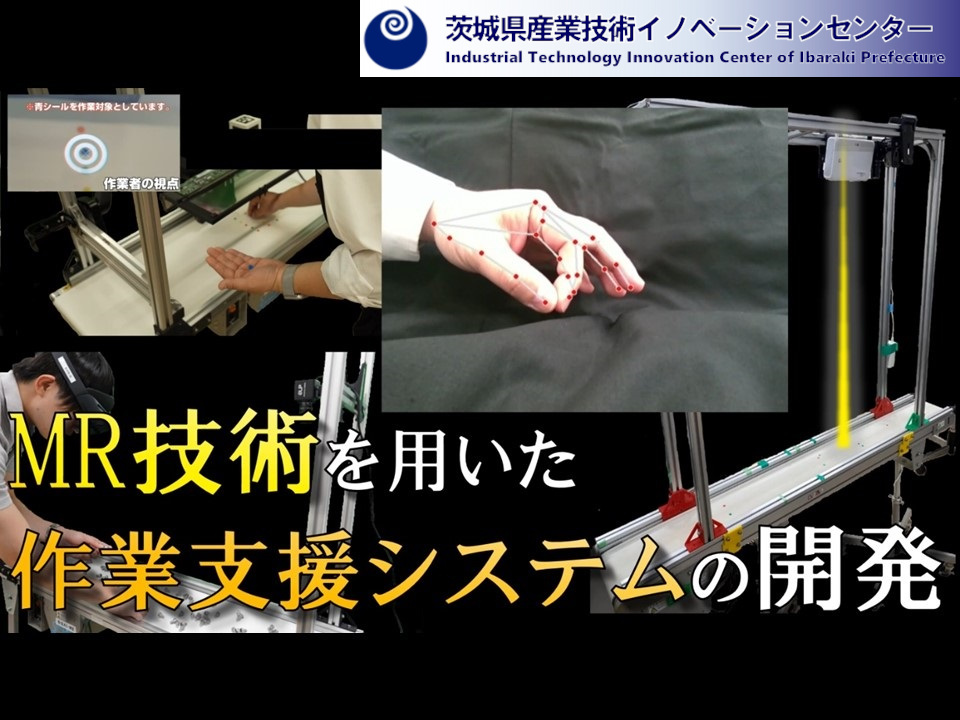
検索はこちらから 一覧 - 工業 令和7年度 ワイヤ吊り下げロボットの把持機構 風力発電設備におけるブレード(羽)の補修を目的に、ドローンから吊り下げたロボットがブレードを把持し、安定した状態で補修できるロボット機構及び制御手法を開発しました。 キーワード PID制御 風力発電 ロボット 把持 ドローン お問い合わせ 研究推進G 令和7年度 再撮影システム搭載ドローンの開発 風力発電設備におけるブレード(羽)の外観検査におけるドローンの再撮影の自動化を目的に、撮影した画像に対してドローン自身が画質を評価し、その評価結果から次の行動に移す再撮影システムを開発しました。 キーワード 点検 再撮影 ドローン 自律飛行 機械学習 お問い合わせ 研究推進G 令和7年度 ドローンと作業ロボット連携のためのウィンチ式リフトの開発 高所作業へのロボット活用を目的に、風などによる揺れに強いウィンチ式リフトを考案し、ドローンと作業ロボットの連結に適用しました。 キーワード 揺動 ドローン 産業用ロボット 電動ウィンチ お問い合わせ 研究推進G 令和7年度 少量データによる画像検査用AI構築技術 攪拌装置を用いて自動で収集可能な、正常品のみが写った画像と異物のみが写った画像を合成した異物混入画像を用いて学習することで、検査精度を維持しつつアノテーションコストを軽減する手法を開発しました。 キーワード 自動アノテーション セマンティックセグメンテーション AI 異物検査 少量データ学習 お問い合わせ 研究推進G 令和7年度 対象物の位置を提示する作業支援システムの開発 目視による異物検査作業の「見逃し発生」を低減させるため、最先端の複合現実(MixedReality)技術を用いた3種類の作業支援試作システムを研究開発し、それぞれのシステムが持つ特徴を比較分析しました。 キーワード プロジェクションマッピング スマートグラス MR 透過型ディスプレイ 作業支援 お問い合わせ 研究推進G 令和6年度 ドローンによる風力発電設備の空撮点検 画質評価システムを搭載したドローンによる風力発電設備の空撮点検において、画像1枚の処理に時間がかかるという課題に対して、機械学習の計算コストや判定領域の改善によりシステムの高速化を可能にしました。 キーワード 機械学習 高速化 ドローン 画像点検 風力発電設備 お問い合わせ 研究推進G 令和6年度 ドローン自律運転に向けた撮影データ処理手法の開発 風車外観検査の全自動化を目的に、LiDARで撮影した点群のデータ処理による外部環境の認識を行い、自律飛行ドローン点検システムの開発を行いました。 キーワード 自動運転 点群処理 ドローン 自律飛行 お問い合わせ 研究推進G 令和6年度 ドローン自律飛行システムの検証手法の開発 ドローン自律飛行プログラムを搭載した飛行試験は、プログラムエラーなどによりドローンの衝突、墜落の危険が伴います。そこで、自律飛行制御システムの検証プロセスや飛行シミュレーターを開発し、安全かつ効率に検証する手法を考案しました。 キーワード 自律飛行 自動運転 ドローン 飛行シミュレータ 飛行検証 お問い合わせ 研究推進G 令和6年度 少量データによる画像検査AI構築技術 少量の異物混入画像に自動で収集した正常品のみが写った画像と異物のみが写った画像を追加し学習することで、AIを用いた検査精度を向上させることができました。 キーワード 少量データ AI 異物検査 画像処理 お問い合わせ 研究推進G 令和6年度 MR技術を用いた作業支援システムの開発 当センターではこれまで、プロジェクションマッピング、スマートグラス及び透過型ディスプレイを使用した作業支援システムの研究開発に取り組んできました。本システムに関して、作業者の手の動作に応じた作業指示マーカーの表示にすることで、作業効率を向上させることができました。 キーワード ハンドトラッキング MR XR 作業支援システム お問い合わせ 研究推進G 12next